一、概述:
Delta机构最早由瑞士联邦理工学院洛桑分校的Reymond Clavel教授于1985年提出。Delta机构由静平台(基座)、动平台及三条相并联的支链构成,每条支链包括主动臂和从动臂。旋转电机驱动主动臂,最终带动动平台移动。
、 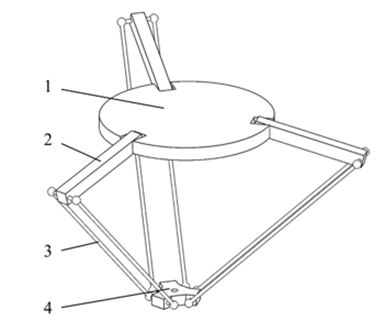
1-静平台(基座) 2-主动臂 3-从动臂 4-动平台
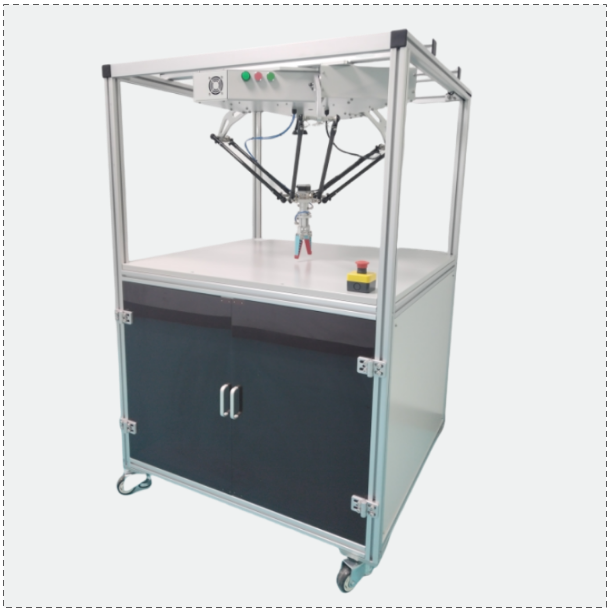
iCATS-Delta机器人平台就是基于上图所示的Delta结构优化设计而得,它能在XYZ空间中灵活运行,特别适用于食品药品、电子产品等领域的加工、装配、分拣和包装等工作场景。
Delta机器人由机械本体、电气控制和控制软件三部分组成。各部分均采用开放式架构、模块化设计。
机械结构设计方面,以最大限度选用标准件为原则,减少自定义零件,缩短设计周期,也降低了装配难度。
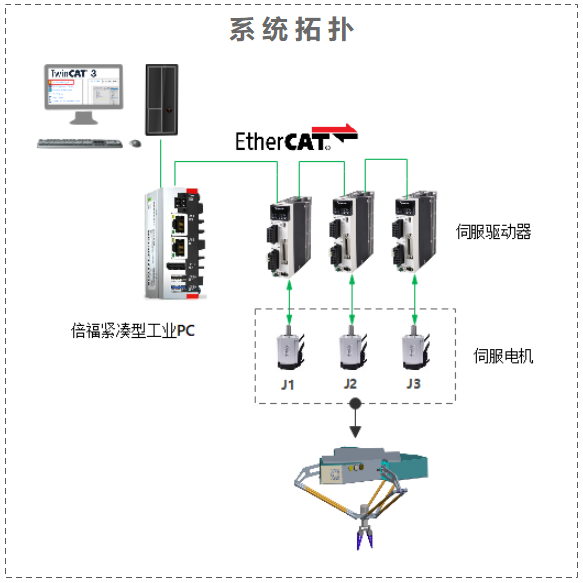
控制方面,选用基于EtherCAT工业以太网通信技术的伺服驱动系统,各伺服轴与控制器之间只需一根网线,一网到底,极大简化了电气接线。
软件方面,基于TwinCAT3自动化软件平台,支持ST、LD、python等语言开发控制程序,通过修改Delta运动学有关参数代码,方便地实现了Delta机器人三个电机的伺服控制。
二、系统拓扑

三、主要特点:
◇ 开放式机体结构;
◇ 采用EtherCAT总线控制的伺服驱动系统;
◇ 提供控制源代码,特别适合实验、实训等学习场景;
◇ 开放式控制架构、可持续升级。
四、主要技术指标:
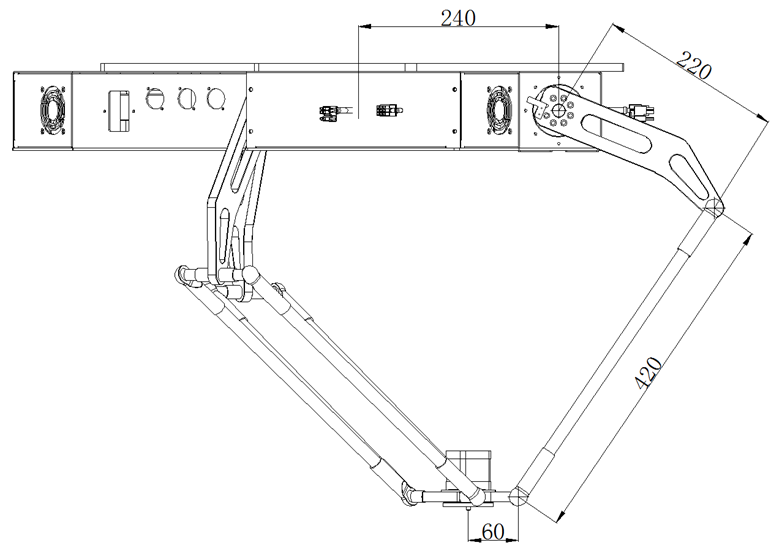
(1)机械结构主要参数:
◇ 主动臂长度(rf):220mm
◇ 从动臂(re):420mm
◇ 定平台半径(f):240mm
◇ 动平台半径(e):60mm
◇ 本体外形尺寸(L*W*H):660*600*720 mm
◇ 整机质量: 30.5 kg (不含工作台支架)
◇ 工作台尺寸(L*W*H):940*1000*1600 mm
(2)性能参数
◇ 驱动电机:松下伺服MSMF042L1V2M(带刹车);
◇ 动平台旋转电机:42步进电机(@EtherCAT总线);
◇ 重复定位精度:±0.1mm
◇ 最大负载:1.5kg
◇ 动平台运动范围≤Φ240*120
◇ 功能: 绘图、搬运物品等。
(3)实验项目:
◇ 点动(PTP)控制实验;
◇ HMI界面设计调试实验;
◇ Delta机器人运动学建模(正解/反解);
◇ 直线/圆弧插补控制实验;
◇ NC系统的搭建与配置实验;
◇ 基于ADS通信的同步运动实验。