一、 产品概述
SCARA机器人广泛应用在设备密集型产线的装配、搬运、分拣、点胶等工艺。我 们基于PC+EtherCAT工业以太网控制技术,开发出一款针对机电控制教学领域的桌面型SCARA机器人,该机器人结构紧凑、开放、易维护、可升级和可一网到底的总线优 势,满足多层次机电控制、自动化及工程创新实验教学需求。该机器人实验开发平台核心特点在于开放性,结构的装配关系和传动过程一目了然;控制系统采用PLCopen推动的IEC61131-3国际工控标准,机器人底层控制系统代码开源,可供学生编程参考。
二、主要特点:
◇ 开放式机体结构;
◇ 采用EtherCAT总线控制的伺服驱动系统;
◇ 提供控制源代码,特别适合实验、实训等学习场景;
◇ 开放式控制架构、可持续升级。
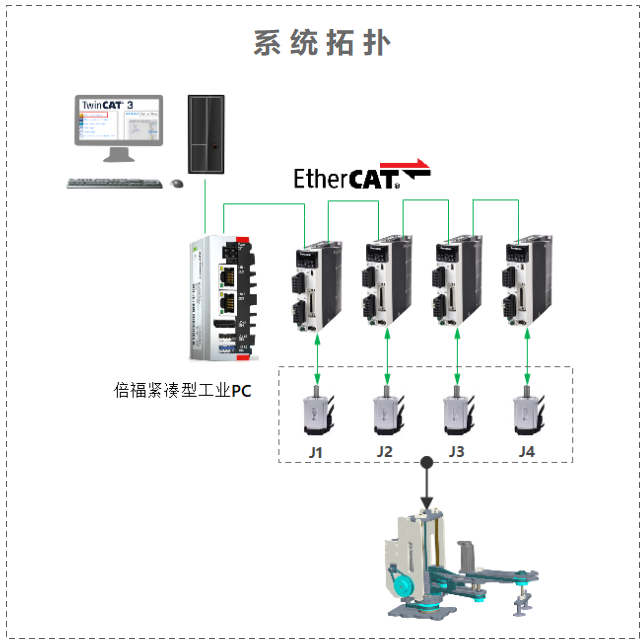
三、电气构成:
SCARA机器人实验开发平台控制系统的核心为EtherCAT伺服驱动器和驱动电机。采用EtherCAT工业以太网协议,各关节驱动器之间、驱动器与上位机均通过网线一网到底,因此电气连接十分简洁,如下图所示:

四、 主要技术指标
(1)技术参数:
尺寸参数:
◇ 小臂长度:152mm;
◇ 大臂长度:200mm;
◇ 升降行程:150mm;
◇ 外形尺寸:540*180*340 mm;
同步带轮减速比:
◇ 腕部减速比:4;
◇ 小臂减速比:12;
◇ 大臂旋转减速比:20;
◇ 大臂升降:电机转动一周行程为10.16mm;
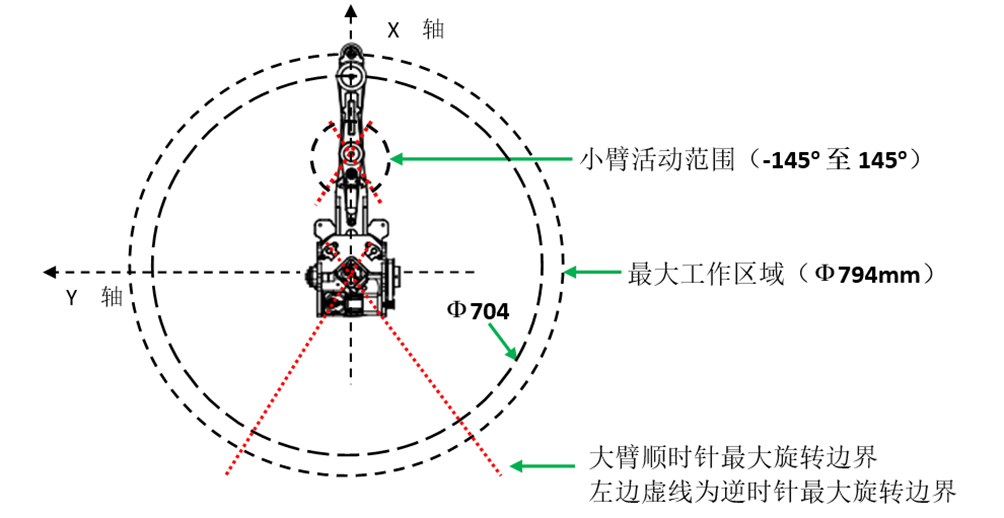
工作范围/能力:
◇ 大臂旋转角度:±125 o;
◇ 小臂旋转角度:±145 o ;
◇ 腕部旋转角度:360°;
◇ 最大工作半径:794mm(含腕部附件);
◇ 机械臂末端负重2kg(含执行器的重量)
(2)实验项目:
◇ 点动(PTP)控制实验
◇ HMI界面设计调试实验;
◇ SCARA机器人运动学建模(正解/反解);
◇ 直线/圆弧插补控制实验;
◇ NC系统的搭建与配置实验;
◇ 基于ADS通信的同步运动实验。