一、 产品概述:
iCATS-LIN-B一维直线倒立摆主由直线模组、交流伺服电机、光电限位和数字光 栅尺、摆杆套件等几部分组成。系统采用具有传输速度快、高实时性的工业以太网协议(EtherCAT)的PLC模块和交流伺服驱动器作为驱动控制、动态测量的核心。直模 组采用工业级、高精度滚珠丝杠驱动结构,并配置有数字式光栅尺,可进行全闭环控 制,是研究机械系统动态特性及复杂控制问题的理想实验平台。
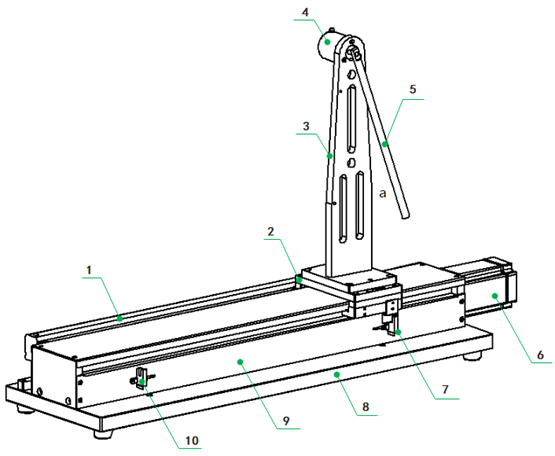
1. 数字光栅尺 2. 工作滑台 3. 导杆支架 4. 旋转编码器 5.导杆
6. 伺服电机 7. 光电限位(右) 8. 模组底座 9.直线模组 10. 光电限位(左)
二、 本体结构/系统构成
一维工作台:包含直线模组、工作滑台、交流伺服电机、光电限位和数字光栅尺等几部分组成。采用工业级高精度滚珠丝杠结构、交流伺服电机驱动,可独立开展工程测量及闭环控制实验。
摆杆套件:由摆杆支架、摆杆和旋转编码器组成,安装在一维工作台的移动工作台上组成一级倒立摆系统。
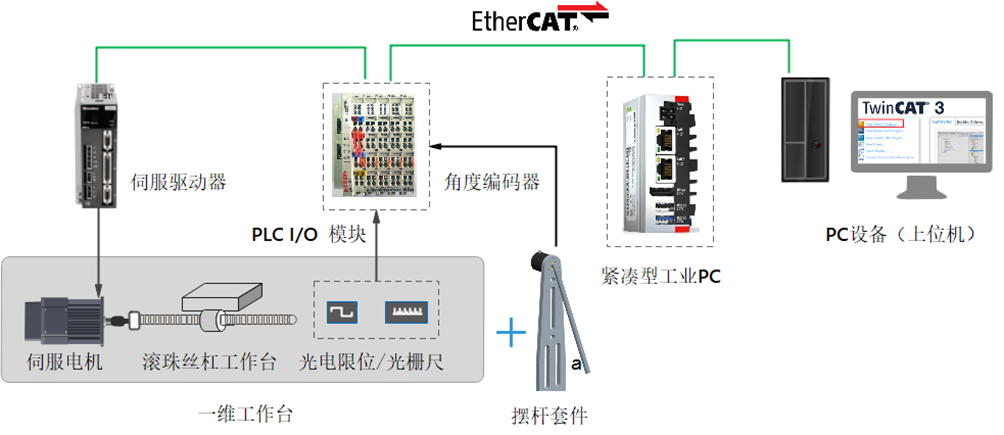
系统构成:与智能测控基础实验台配套使用,构成如下图所示:
三、 主要技术指标
(1)技术参数:
◇ 输入电源:220V /50HZ;
◇ 外形尺寸(长*宽*高): 740*200*460(mm);
◇ 控制/驱动系统:基于EtherCAT通信协议PLC和交流伺服驱动系统;
◇ 额定功率:200W
◇ 额定转速:3000rpm(最高转速6000rpm)
◇ 直线模组:工业级滚珠丝杠结构
有效行程:400mm,
丝杠导程:10 mm;
最大速度:250 mm/s
重复定位精度:±0.02mm
定位精度:0.05mm
◇ 摆杆套件:
摆杆尺寸:Φ10*160 mm;
摆杆质量:54g;
◇ 反馈传感器:
限位:槽型光电传感器2个;
速度及位置反馈:绝对值编码器和数字光栅尺;
角度反馈:2500线旋转编码器;
◇ 软件平台:MATLab和TwinCAT。
(2)实验项目:


◇ 工作台阶跃响应实验;
◇ 工作台位置控制实验
◇ 工作台力矩控制实验
◇ 时间响应与PID控制实验
◇ 频率响应与系统辨识实验
◇ 倒立摆系统建模与稳定性分析
◇ 倒立摆自动起摆控制
◇ LQR状态反馈平