一、产品概述:
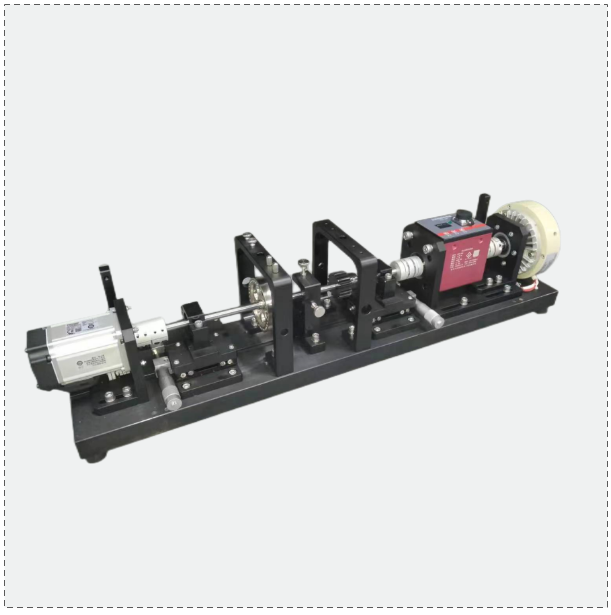
通过基于EtherCAT协议的伺服驱动器驱动交流伺服电机,控制轴承转子实验台的转矩及转速,搭载多种传感器感知转子当前的运行状态。
转子轴承实验台结构简单,拆装方便,操作简便,性能稳定的特点。实验台可根据实验需求灵活调节负载大小、转速伺服控制、旋转轴心可调节,配置振动、转速、位移、动态扭矩等机械参量测量的传感器。可以模拟旋转机械升降速瞬态过程及稳态 运行工况的振动状态,及多种常见的旋转机械故障并进行故障特征分析,例如轴偏心、滚动轴承故障诊断、转子动平衡测量等。也可通过在边缘数据存储中构建设备维护模型,实现预测性维护功能。
二、 系统构成
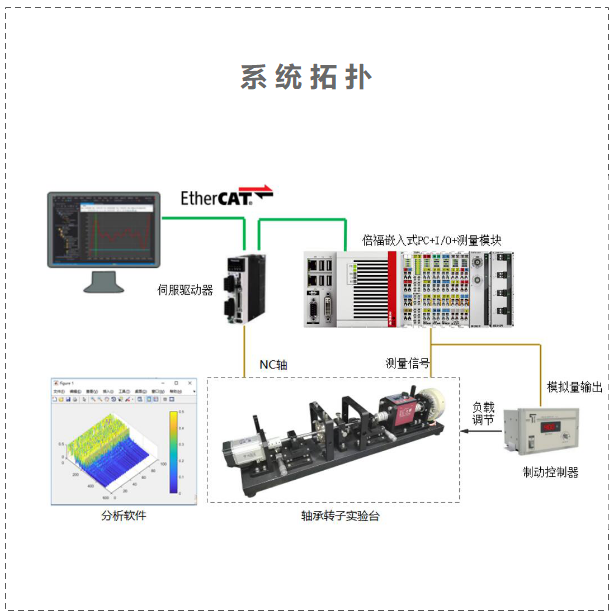
智能感知和控制实验系统包含智能A型实验台和轴承转子实验台两大部分构成,伺服驱动器、 I/O模块及电源及接口单元均安装在智能A型实验台上面,系统构成如下图所示:

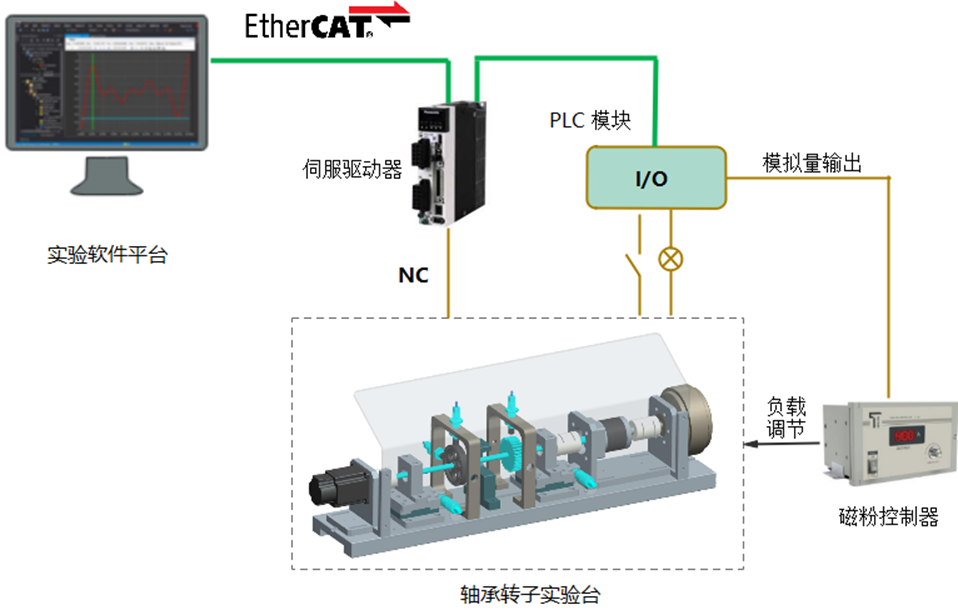
三、 电气拓扑
四、 主要技术指标
(1)技术参数
◇ 转子台本体尺寸: 760 X 150 X 300(mm);
◇ 本体材料: 45#钢;
◇ 导杆: Φ10镀铬导杆;
◇ 轴承型号: 6000Z;
轴承尺寸: 26.mm*10mm *8.00mm ;
◇ 测速齿轮: 18齿;
◇ 驱动控制方式: EtherCAT总线交流伺服控制;
◇ 驱动电机功率: 400W;
◇ 磁粉制动器: 6N·m;
◇ 传感器配置: 动态扭矩传感器、电涡流传感器、振动加速度传感器、振动速度传感器、磁电转速传感器;
◇ 其它: 转子轴心可调节,配有可配重的飞轮机构(转子不平衡量调节)。
(2)开展实验项目

认知和基础实验(传感器与检测技术)
◇ 磁电传感器——转速测量
◇ 电涡流传感器——轴心轨迹测量
◇ 振动速度传感器——振动速度测量
◇ 光电编码器——角速度测量
◇ 振动加速度——振动加速度测量
综合性实验(状态监测与故障诊断)
◇ 轴系动平衡实验;
◇ 稳定转速下轴承故障诊断与分析;
◇ 变转速下轴承故障诊断与分析;
◇ 振动加速度信号短时傅里叶变换及谱阵分析实验;
◇ 基于MQTT的状态监测实验;
设计类性实验(机电控制类):
◇ 转子实验台建模与参数辨识
◇ 经典PID控制;
◇ PID参数自整定。